Don’t get me wrong, I am a person that loves to get involved in OpenSource software, so I had a look around about the state of arts in this particular area, and I found Ardusub. I seemed to be a good choice, a predesigned board to manage my submarine. However, what took me away from Ardusub was precisely the requirements of “Autopilot” better known as “Pixhawk” which is a commercial company manufactured for not less than 150€, and I would be risking it may not provide all the features I need: water analysis and buoyancy control system.
I decided not to use Ardusub, and it was a great decision. I wanted to learn and face all the problems that this project had for me. Also, starting from scratch was the best way to learn, and so far, I have learned a lot about physics and electronics. I got the pleasure of getting hands-on with circuits and components. I have had the chance to decide on the next step each time.
I am an advanced developer with a long track in C and C++ programming (and several other languages), so not sticking with anybody’s software development patterns and standards has been an open road during the development and tests. Now I can jump from an Arduino board to ESP32 and Raspberry Pi Pico with zero effort, so I feel I am on the right path.
Introduction
At the beginning of this project (winter 2018), I didn’t know much about Arduino, ESP32, Raspberry Pi, or MicroPython…in fact, I didn’t know much about electronics or microcontrollers, nor about programming them or existing modules. However, I still remember a bit of theory while studying Engineering Computer Science at the University of Málaga.
So I decided to buy an Arduino Starter Kit and start learning. Since Arduino is C, all the developments I made in this area are C and C++. I have extensive knowledge of C programming, so I already feel comfortable with it to develop whatever comes to my mind.
In the first stage, I walked through all examples and modules I planned to use in Alioli UAV Submarine Dron. After that, I learned, designed, and improved methodologies for building what I expected to create later.
But I wasn’t feeling comfortable enough with Arduino IDE, so I moved to Vim (my usual IDE) and made it to check and highlight syntax for my Arduino Code.
In the beginning, I used a Makefile to compile, upload and monitor the execution of my programs. Later, I discovered PlatformIO, a game changer, and everything came far easier.
Printf and float number in Arduino
The most challenging part that took me long to find out is that Arduino’s print doesn’t print float as you would typically expect, but it doesn’t fail either. The reason to be programmed that way was that the final software would use too much memory to link unnecessary libraries to show float numbers on print. So Arduino core developers decided to keep float representation away to keep the software thin.
If you need to print out some float, you have to print it as a string using the function dtostrf(FLOAT, WIDTH, PRECISION, TEMPSTRING), for example:
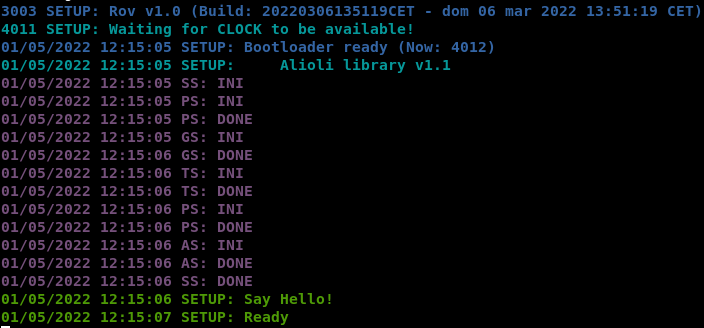
Based on my experience, I decided to make my first improvement to the framework with a new library I named Alioli, which included my beloved print_debug() function that takes care of everything when printing to the screen, including colours and headers. It works out of the box with RTC or without it, so it shows up millis() or a date time on each printed line, depending on whether the RTC module is enabled.
Quick Start (clone, compile, upload & monitor)
The first thing to do is to get the source code on our computer from Alioli Github:
git clone https://github.com/juanmitaboada/alioli
The latest versions are working with PlatformIO. If you want to compile and upload a test, you should visit the folder “testio/“, which has a tiny program you can put on your hardware and test how PlatformIO performs. In that folder, there is a file named “cmds.txt” with examples:
# Compile only for MEGA 2560
pio run -e megaatmega2560
# Compile and upload to MEGA 2560
pio run -e megaatmega2560 -t upload
# Compile only for Raspberry Pi Pico
pio run -e pico
# Compile and upload to Raspberry Pi Pico
pio run -e pico -t upload
Framework
There are several folders in Alioli:
buoy: this software is used by the Buoy System (on the surface) to position the ROV on the earth, and it will track communication with the remote base using a GPRS connection.
common: this folder keeps shared libraries used by “buoy” and “rov“.
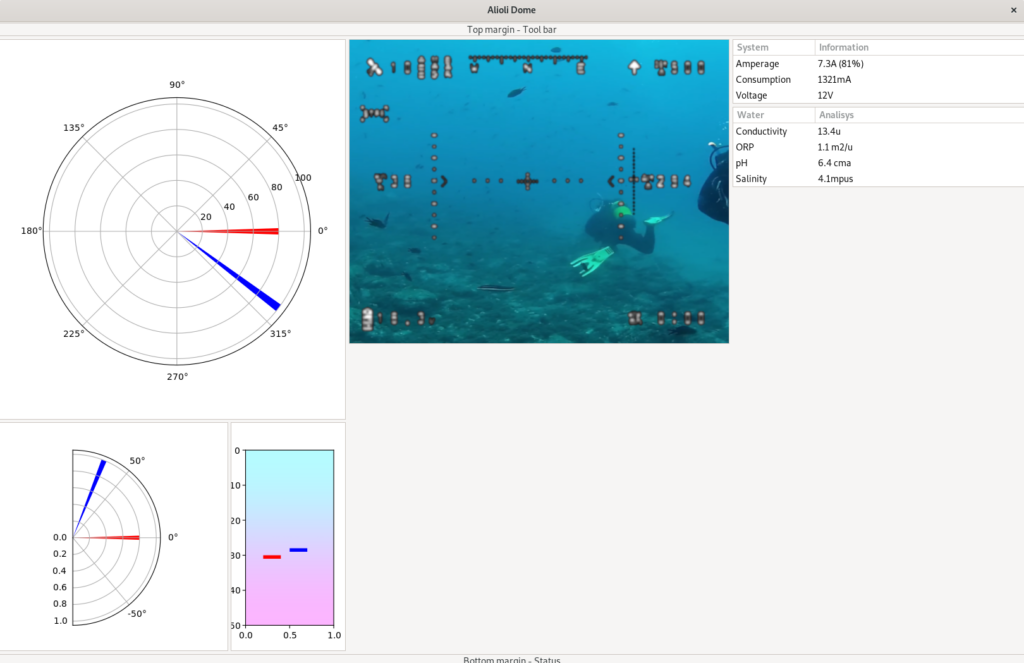
dome: this was an attempt to make my own visor to watch and manage everything going on from the base station. You can see an example of this environment below. I developed it in Python using Matplotlib, Gtk, Webkit2, pyPS4Controller, OpenCV, and CODENERIX. Unfortunately, this project was deprecated after I learned the Mavlink protocol and started using QGroundControl to manage everything from the base station.
rov: this is the first development I made with Arduino, and it belongs to the software the Underwater ROV Submarine will be using.
testio: this folder has already been explained and contains a small test to check boards and new features.
How was looking DOME
The first version of DOME (PS4 and Video already working)
DOME: Python + Gtk + PS4 Controller
DOME: Python + Gtk + PS4 Controller + OpenCVThe latest version of the DOME base station environment (sensor already working)
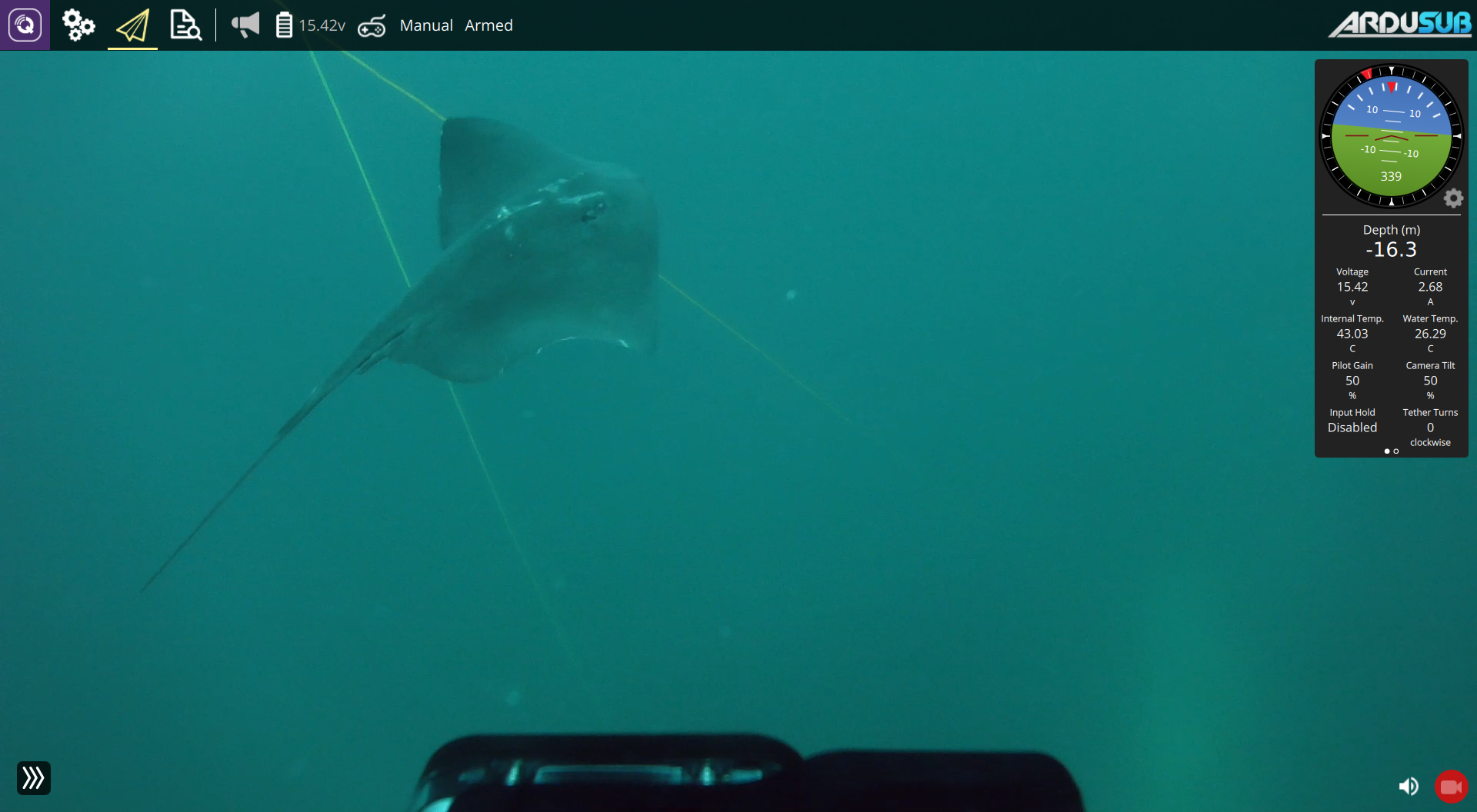
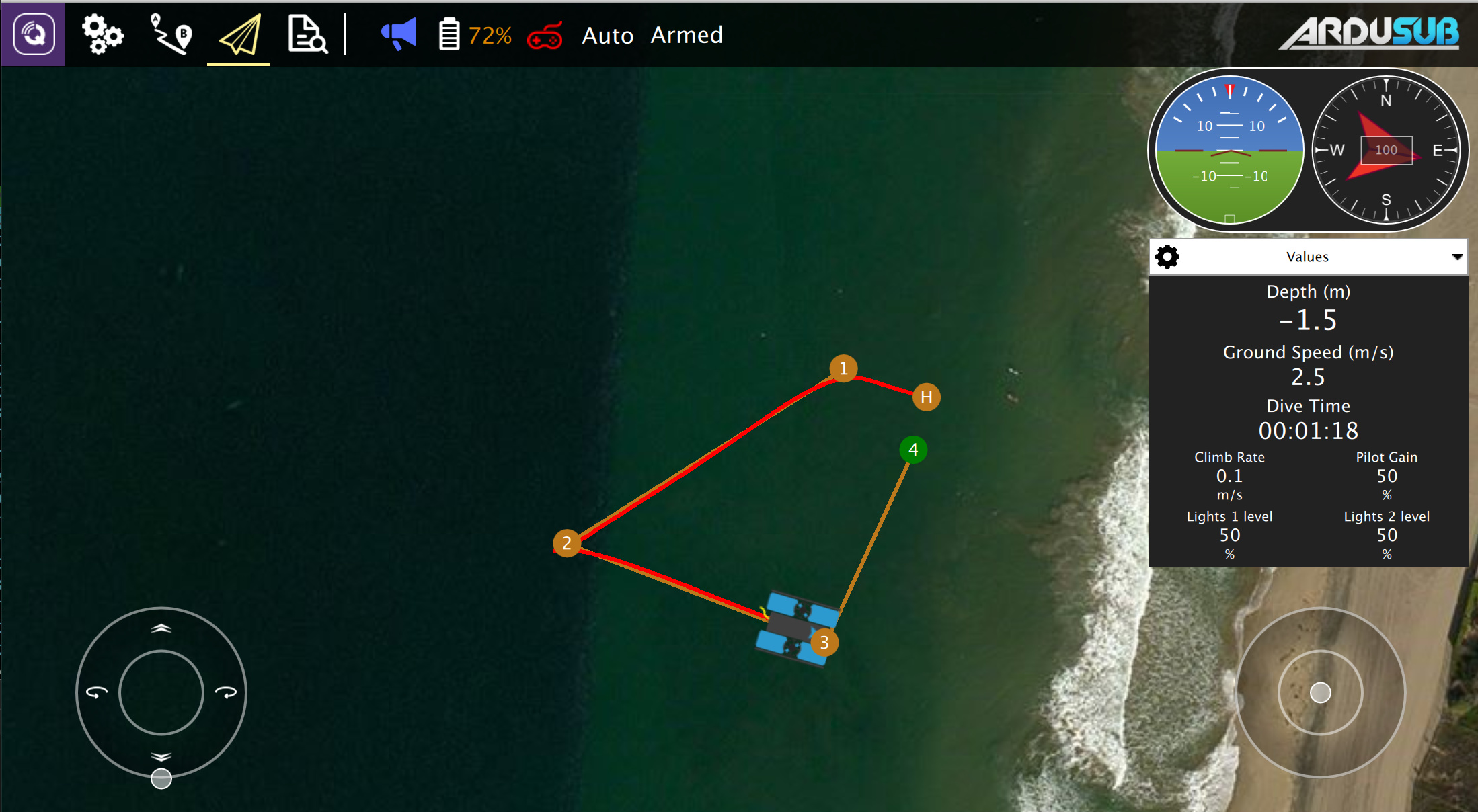
After learning the Mavlink Protocol, Alioli connected to the Internet using GPRS and linked to a central server to allow direct communication from QGroundControl. Next are examples of what QGroundControl looks like (the reason why Alioli Dome has been deprecated):
QGroundControl Camera ViewQGroundControl Plan
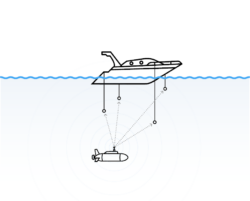
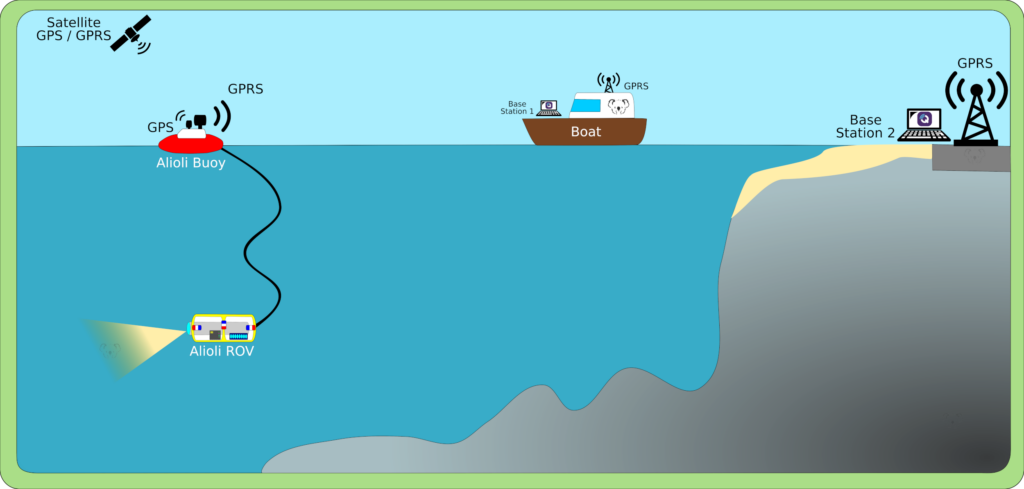
ROV, Buoy, and Base Station Schema
The following diagram explains what Alioli‘s entire system looks like:
Schema of Alioli ROV + Alioli Buoy + Base Station (boat & ground)
System Orchestration
The software must well orchestrate the system to reduce points of failure. In this architecture, the central system is the Alioli Buoy.
When Alioli ROV starts, it performs all the setup actions and waits for Alioli Buoy to send its messages. Alioli ROV will work as a microservice answering any request Alioli Buoy has. Some of these queries may be requests for Telemetry others may be to move or change path direction.
When Alioli Buoy starts, it recognizes Alioli ROV and ensures it is ready to work. Alioli Buoy will also connect to the Internet through GPRS and register on the central server.
The central server handles Alioli Remote Connections. When some Alioli Buoy registers, the central server provides a forwarded port to its dynamic IP address, making it possible to connect QGroundControl to the central server. The central server will redirect all the traffic between those 2 (Alioli Buoy and QGroundControl).
The final step is to start and connect QGroundControl to the central server IP address and port. After that, QGroundControl will do the rest of the job with the user interface, PlayStation controller, camera, GPS, maps, telemetry, and other essential details required for navigation.
Framework Modules
The ROV and Buoy software is built on modules. All modules together work in collaboration, executing the expected actions from the pilot. Each module has 2 main functions setup() and loop().
The setup() function is responsible for the initialization of the module. It will prepare all required variables and set up the system and electronics modules it manages.
The loop() function is responsible for executing the scheduled tasks for the rest of the time, and it will be called very often to give the module a chance to complete its actions. Depending on each module, they will read and save data into the main structures and communicate with the electronic components to get them to do their job.
In the same way that the main program calls to setup() and loop() from each module, each module as well will call to setup() or loop() functions from other internal modules. For example, the Sensor Module will set up the Temperature Module, Gyroscope Module, and other Sensor-based Modules.
Typically the modules control how they do their tasks based on the system’s clock, so every n-seconds, they will perform the routine tasks. As a result, modules will not interrupt the main loop when not in action.
ROV Software structure
You can find the source code at /rov/src:
Each module has its folder, and there may be submodules related to that one.
main.ino: the main file with the setup() and loop() functions will call in an ordered manner to the rest of the modules.
setup():
Starts the RTC Module (clock)
Starts monitoring (visible lights to know how the software is performing)
Starts transmission (prepare to communicate with Alioli Buoy)
Starts control (buoyancy and pad, it takes care of deciding movements)
Starts sensor (prepare all sensors to work)
Starts brain (makes decisions and tries to stick to the plan)
Start engines (prepare engines to work)
loop():
Control (it takes care of stability)
Sensors (read all sensors):
Gyroscope
Power
Pressure (depth)
Temperature
Water analysis (Conductivity, PH, ORP / Redox, Turbidity & Salinity)
Transmission (read and send messages using RS485 bus from/to Alioli Buoy)
Brain (make decisions about subsequent movements)
Engines (execute the requested engine’s commands)
Monitor (blink lights depending on the state of the system)
Buoy Software structure
You can find the source code at /buoy/src:
Each module has its folder, and there may be submodules related to that one.
main.ino: the main file with the setup() and loop() functions will call in an ordered manner to the rest of the modules.
setup():
Starts the RTC Module (clock)
Starts sensor (prepare all sensors to work)
Starts transmission:
Prepare to communicate with Alioli ROV and says “Hello” to it
Connect the GPRS Module, get connected to the Internet, and get registered
loop():
Sensors (read all sensors):
Gyroscope
Power
Temperature
Transmission:
Read and send messages using a GPRS connection to QGroundControl (the communication will happen in Mavlink Protocol)
Read and send messages using RS485 bus from/to Alioli Buoy (the communication will happen in Alioli’s Binary Protocol)
Read GPS data from GSM Module.
What’s next?
I am working on the communication between QGroundControl <-> Alioli Buoy <-> Alioli Rov.
The ROADMAP is:
Communication improvements:
Make Alioli Buoy understand QGroundControlMavlink commands and forward them to Alioli ROV.
Make Alioli Buoy answer to QGroundControl using Mavlink Protocol with augmented answers from Alioli ROV.
Basic Mavlink command to develop:
Basic movements
Telemetry transmission
Develop a stability system for the Alioli ROV to make it keep direction and depth.
Improve the Alioli Buoy board with a couple of Temperature sensors to measure the battery and surface water.
Add the camera and configure and solder the OSD Module in Alioli ROV.
Attach and configure the transmitter in Alioli Buoy (5,8Ghz)
Prepare boxing for both systems and test the system in a swimming pool
This post contains the conclusions of the Alioli ROV Submarine Drone and shows images and videos of it in the water. I wrote it as a diary so anybody can understand that Alioli wasn’t a straight project, but it had problems, and I had to resolve them on the way. In my last post about […]
In my last post, “Underwater Alioli ROV“, I shared all the information I got from the Internet to build my Underwater ROV. In this post, I will explain how I made the frame. The main thing the ROV needs to become real is a frame, something to rest on. After checking several designs from different […]